Description
IES-RA-609
KEY TECHNICAL SPECIFICATIONS
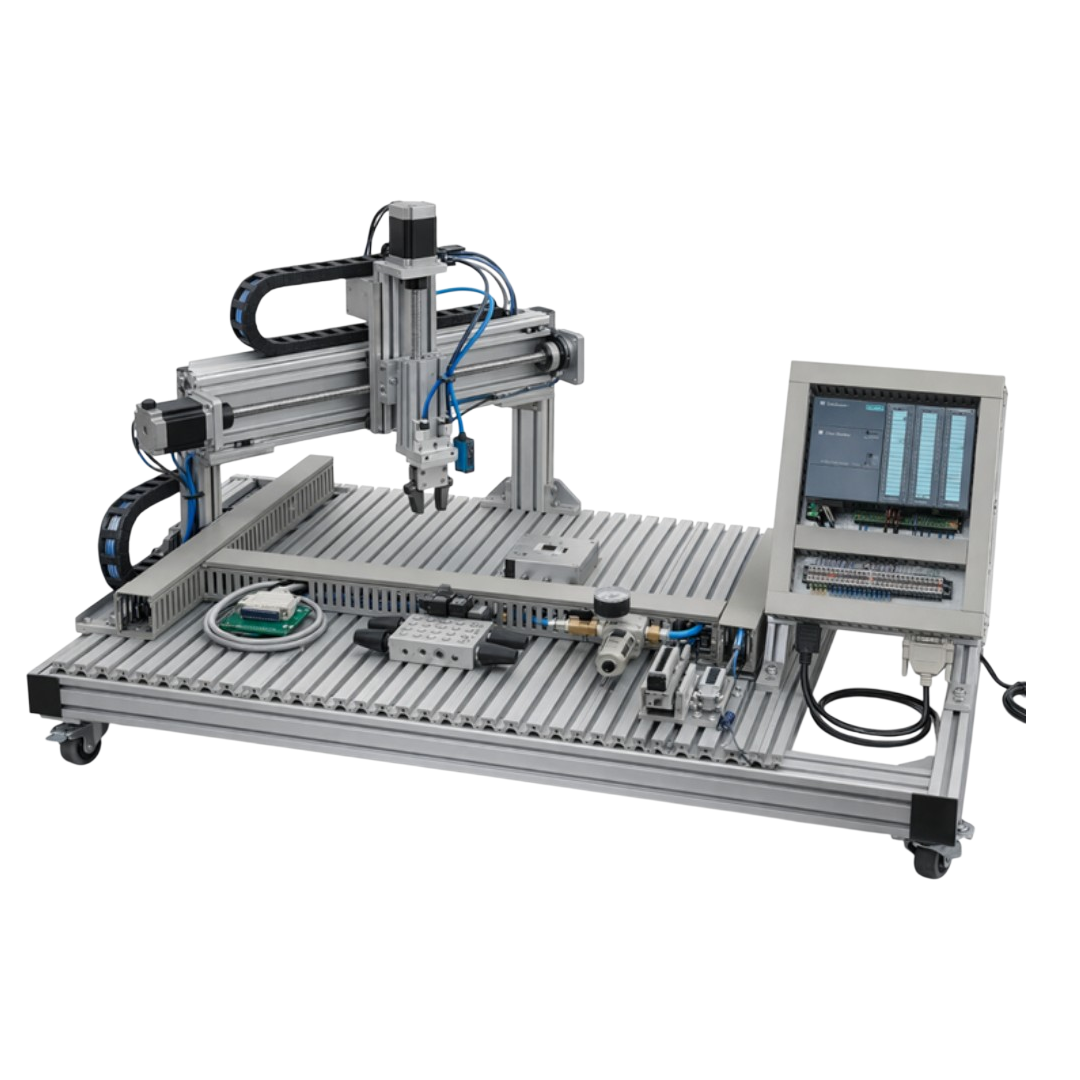
- Cartesian Gantry Robot System
Three-axis robotic motion platform designed for linear positioning and automated material handling. - Linear Motion Actuator System
Ball screw driven actuators providing precise motion along X and Y axes for positioning and automation tasks. - Vertical Motion Module
Pneumatic Z-axis slide mechanism enabling vertical movement for pick-and-place operations. - End Effector Handling System
Pneumatic parallel gripper designed for automated component handling and material transfer. - Industrial Sensor Integration
Position sensors and photoelectric sensors used for detection, positioning and automation logic control. - PLC Control System
Industrial PLC-based control platform used for motion sequencing and automation programming. - Pneumatic Control System
Solenoid valve manifold with air preparation unit for pneumatic actuator and gripper control. - Modular Workstation Structure
Industrial aluminium profile workstation providing stable mounting and modular training configuration. - Cable Management System
Drag chain and cable duct system for organized routing of electrical cables and pneumatic tubing. - Automation Interface Modules
Industrial I/O interface modules supporting PLC communication and automation control integration.
RANGE OF EXPERIMENTS
- Cartesian robot motion control experiments
- Pick-and-place automation operations
- PLC based robot control programming
- Pneumatic gripper operation and control
- Sensor-based robotic positioning experiments
- Industrial gantry robot automation applications
- Integration of sensors and actuators in automation systems
FEATURES
-
Three-axis gantry robotic motion system
-
Ball screw based linear actuator positioning system
-
Pneumatic gripper based handling mechanism
-
PLC controlled industrial automation platform
-
Integration of industrial sensors for automation logic
-
Modular aluminium profile workstation design
-
Suitable for robotics and industrial automation training laboratories















Reviews
There are no reviews yet.